Prozessprobleme mit EtherCAT®-Echtzeit-Datenerfassung frühzeitig erkennen – Teil I
6/8/2017
MFC Serie GF100 mit verbesserter Betriebsleistung
In vielen fortschrittlichen Fertigungsstätten steigt die Nachfrage nach einer schnellen und flexiblen Maschinenkommunikation über Ethernet-basierte Busarchitekturen.
EtherCAT® ist ein 2003 eingeführtes Ethernet-basiertes Kommunikationsprotokoll. EtherCAT® ist seit 2007 ein anerkannter internationaler Standard. Er bietet eine außergewöhnliche Performance für Automatisierungsanwendungen, die Echtzeitinformationen und kurze Reaktionszeiten erfordern.
Die MFC-Technologie (MFC-Massendurchflussregler) kann diese Möglichkeiten sinnvoll nutzen. Protokolle wie EtherCAT® bieten die Möglichkeit, den Austausch kritischer MFC-Diagnose- und Leistungsinformationen mit übergeordneten Maschinensteuerungen zu verbessern. Dies sind wesentliche Gründe, warum Brooks Instrument die Halbleiter-Implementierung der EtherCAT®-Schnittstelle auf seiner Produktplattform der GF100-Serie eingeführt hat
Wie EtherCAT® funktioniert
EtherCAT® nutzt eine Master/Slave-Architektur sowie ein "on the fly"-Prinzip, um Echtzeitfähigkeit ohne Verzögerungen zu gewährleisten. Der EtherCAT® -Master sendet ein Telegramm, das jeden Knoten durchläuft, während er sich stromabwärts bewegt. Jedes Slave-Gerät liest die Daten "on the fly" und fügt seine Daten dem Frame hinzu. Diese einzigartige Technologie ermöglicht es einem Slave-Knoten, eine EtherCAT®-Nachricht zu empfangen und weiterzuleiten, bevor der Knoten die Daten verarbeitet, was bedeutet, dass die Informationen viel schneller verbreitet werden können, was die Antwortzeit verkürzt. Sobald der letzte Knoten einen offenen Port erkennt, wird die Nachricht an den Master zurückgesendet.
Durch den Anschluss des letzten Knotens der Serie an einen Ethernet-Port im Master-Gerät kann diese Linientopologie-Konfiguration in eine Ringtopologie umgewandelt werden. Die Ringtopologie ermöglicht Redundanz und stellt sicher, dass bei einer Fehlfunktion des Systems, wie z.B. einem Kabelbruch, die Betriebszeit maximiert und die Kommunikation fortgesetzt wird. Dies kann bei Anlagen mit kurzen Zykluszeiten wichtig sein, damit die Prozesse nach einer minimalen Unterbrechung reibungslos weiterlaufen können
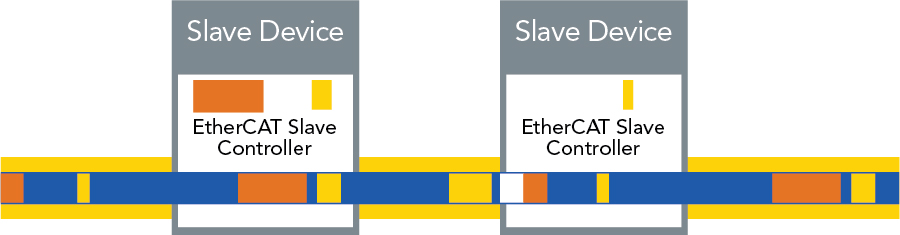
EtherCAT®-Slave-Gerätequelle: EtherCAT®-Technologiegruppe
Jedes Slave-Gerät liest die Daten "on the fly" und fügt seine Daten dem Frame hinzu.
Schneller Datenaustausch
PDO oder Prozessdatenobjekte sind Variablen, die in einem schnellen Datenaustausch kontinuierlich zwischen Slave und Master übertragen werden. Bei der Netzwerkkonfiguration muss der Benutzer die auszutauschenden Daten konfigurieren. RxPDO Mapping definiert die Daten, die vom Master zum Gerät gesendet werden und TxPDO Mapping definiert die Daten, die vom Gerät zum Master gesendet werden.
Die Brooks GF100 Series MFC with EtherCAT® definiert ein Standard-PDO-Mapping für jedes vom Anwender wählbare Geräteprofil oder ein flexibles PDO-Mapping, das mit bis zu 10 Objekten konfiguriert werden kann, die über die entsprechende PDO-Zugriffsberechtigung verfügen müssen. Beispiele für PDO-Objekte, die abgebildet werden können, sind der aktive Ausnahmestatus sowie Durchfluss-, Druck- und Temperaturwerte.
Das Mapping eines Objekts erfordert die Angabe von Index, Subindex und Größe des Objekts in Bits im PDO Mapping Objekt. Objekte mit einem Datentyp, der nicht ein Vielfaches von 8 Bit ist, können erfordern, dass ein "Pad"-Objekt eingebunden wird, so dass das nächste Objekt an einer 8-Bit-Grenze beginnt. Es empfiehlt sich, so kleine Objekte, die kein Vielfaches von 8 Bit sind, so zu gruppieren, dass nur ein "Pad" benötigt wird, da das "Pad"-Objekt als eines der 10 konfigurierbaren Objekte gilt. Die Konfiguration und Zuweisung eines flexiblen PDOs ermöglicht weniger Netzwerkverkehr und ein vereinfachtes System, wodurch Metriken, die für eine bestimmte Anwendung nicht anwendbar sind, eliminiert werden und der Benutzer sich nur auf die wichtigsten Systemattribute konzentrieren kann.
Nachdem wir nun die EtherCAT®-Messaging-Architektur verstanden haben, wird unser nächster Blogbeitrag untersuchen, wie diese Architektur von der GF100-Serie genutzt wird, um eine Reihe von Fehler- und Ausnahmemeldungen an das Automatisierungssystem zu senden
Abonnieren Sie unseren Newsletter hier
Haben Sie Fragen?
Sprechen Sie mit einem unserer Anwendungsexperten, wir helfen Ihnen gerne:
Rufen Sie an unter: +49 351 215 2040